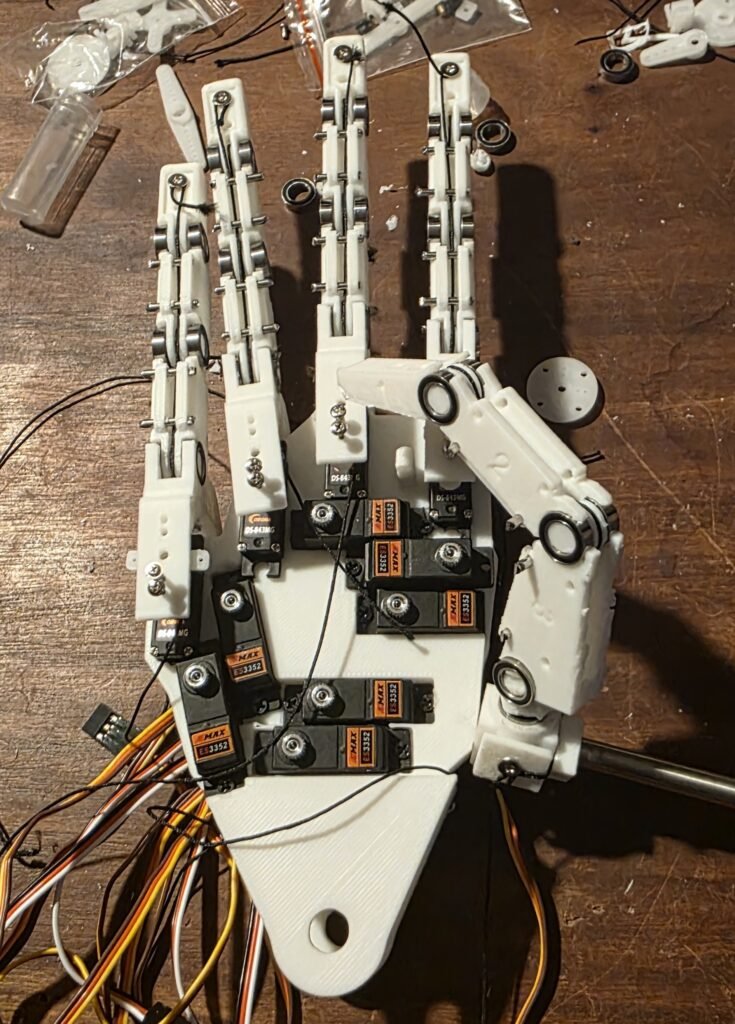
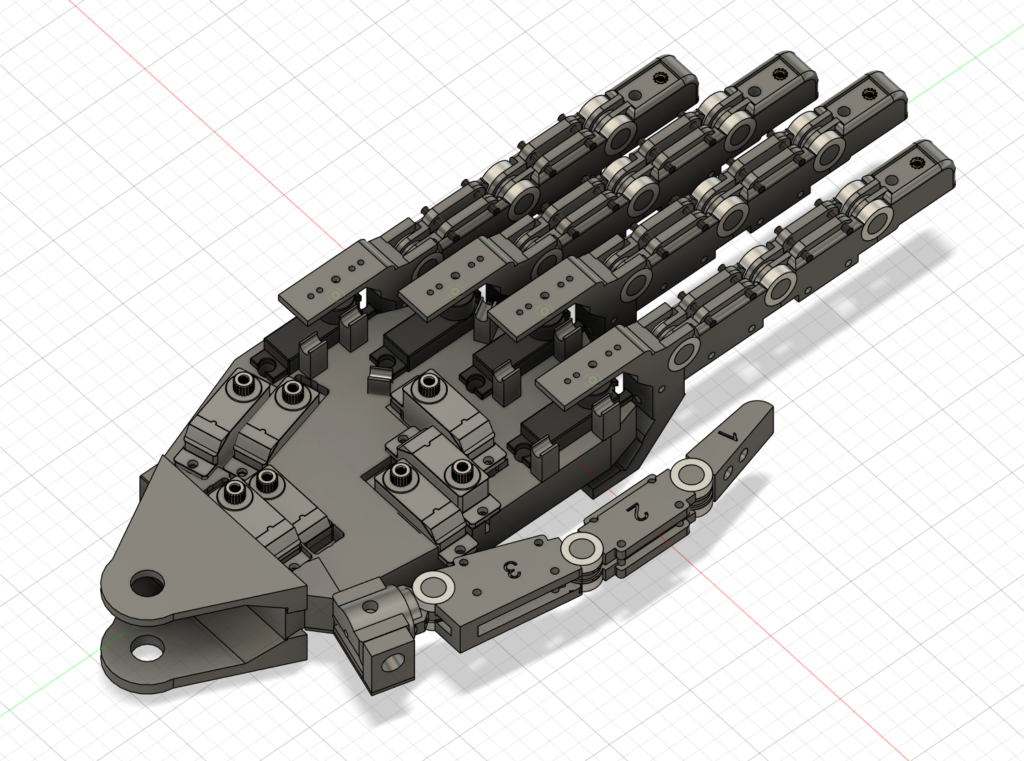
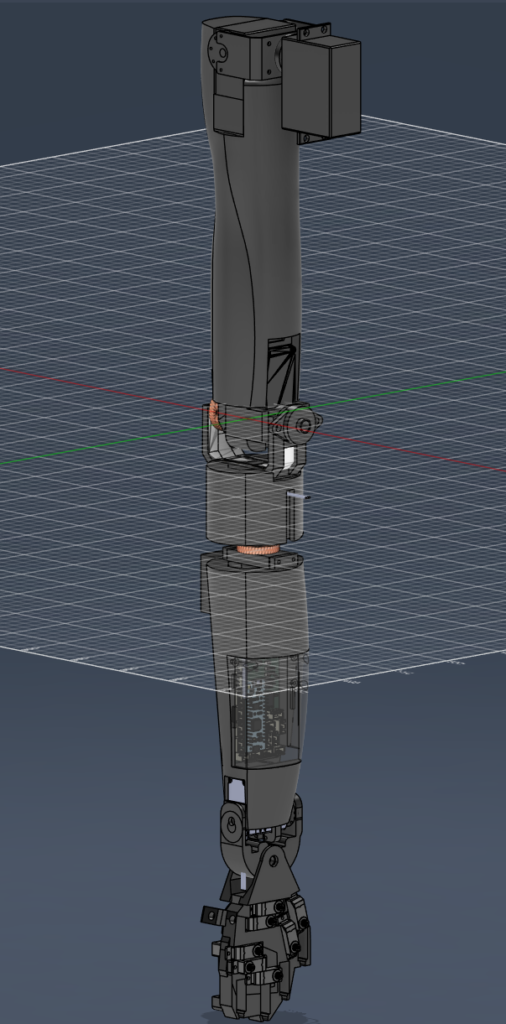
Thanks to multiple servomotors, the arm can reproduce all the movements of a real human arm. The arm includes a hollow section that contains a custom-designed PCB, which controls and supplies power to all the servomotors in the hand and part of the arm.
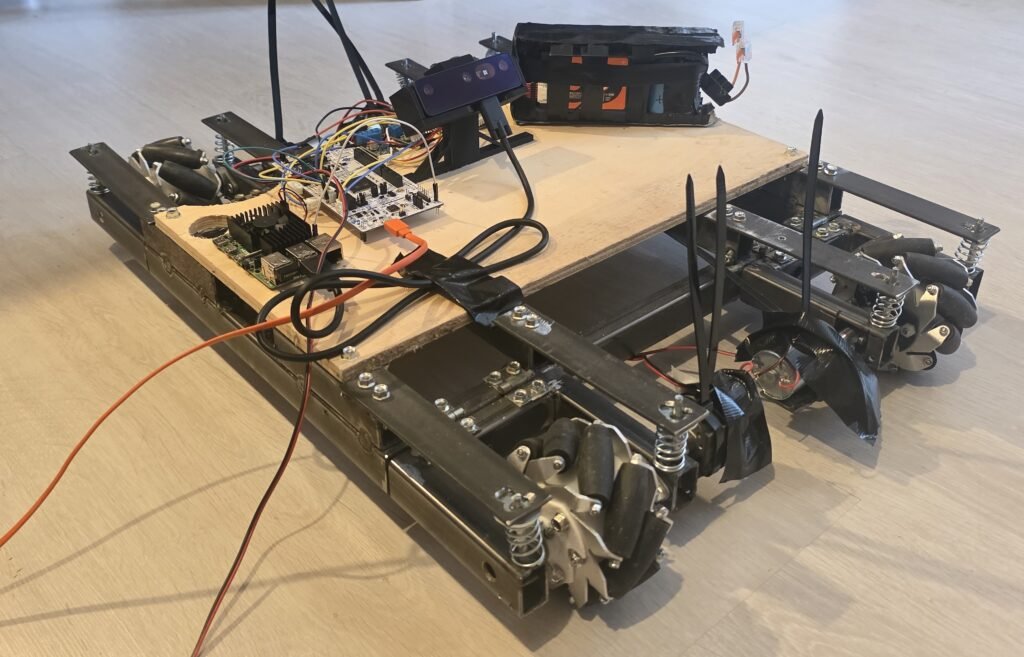
The goal of this section is to create a system that can move along three axes, tilt forward and backward, and lean to the right and left.
I could use DC motors or powerful stepper motors, along with gears and springs, to solve this problem. However, due to budget and time constraints, I chose a different approach.
I decided to use a system based on three linear actuators and a triangular structure. With three actuators, it is possible to simulate movement along the three axes without any issues, and it can also simulate walking motion.
I selected actuators with a speed of 40 mm/s and a force of 200 N. A speed of 40 mm/s is sufficient because the three actuators move simultaneously. To double the effective speed, one actuator can move downward while the other two move upward. If I chose faster actuators, they would not be able to support the required weight.